
科学家采用电永磁技术改进的爬壁机器人,机器人足部增加了微型电永磁吸附机构,研制了专用的驱动器和控制系统,仅在切换吸附状态时需要用电,无需持续通电即可保持吸附或释放状态,大幅提高了爬壁机器人续航能力。
水凝胶驱动器拥有温度,红外光两种响应模式。在高温或近红外光下收缩,复合结构弯向水凝胶一侧,完成抓取动作
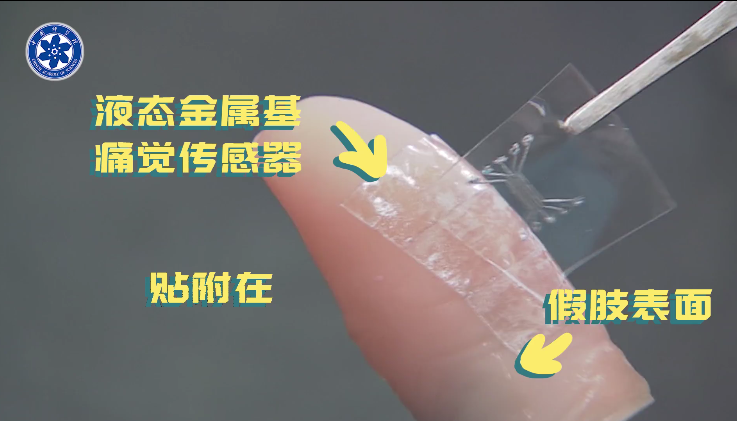
液态金属基痛觉传感器贴附在电子皮肤表面,感知伤口的产生。电子皮肤受伤前,正常感知压力,将橡皮筋挂在人和机械手之间“拔河”,橡皮筋不断增长,压力过大时,机械手“认输”。

研究人员巧妙地将一些具有刺激响应特性的分子引入到水凝胶体系中,当其受到外界环境刺激时,其分子结构会相应地发生改变,从而在宏观尺度上表现出水凝胶的体积、形状等变化。利用这一原理,科研人员再从宏观与微观的角度对水凝胶的结构进行设计,就可以得到能够响应环境变化并改变自身形状的智能变形水凝胶了。
什么是真空?怎样能获得真空?来看看视频吧!
解读隔空充电的技术奥秘
中国科学院宁波材料技术与工程研究所 2007-2015版权所有 浙江省宁波市镇海区庄市大道519号 邮编:315201
负责与维护:网络信息中心 联系方式Email:nic@nimte.ac.cn
建议使用1024*768分辨率,16位以上颜色,Microsoft IE8以上浏览器访问本站
负责与维护:网络信息中心 联系方式Email:nic@nimte.ac.cn
建议使用1024*768分辨率,16位以上颜色,Microsoft IE8以上浏览器访问本站