科技发展到21世纪的今天,大街小巷、网络媒体铺天盖地的都是“机器人”的宣传。串联机器人、并联机器人、移动机器人等等已经成为机器人家族中的重要成员,在工业自动化中有着广泛的应用,在机器人的发展历程中占有举足轻重的地位。
聪明的你肯定会发现,很难将上述东西跟我们想象中的“机器人”联系起来,因为它们离我们想象中的“机器人”实在是太远了。
“理想很丰满,现实很骨感”,是的,机器人这个词最早出现在1921年捷克作家Karel Capek 的科幻小说《罗素姆的万能劳工(Universal Robot)》中,他第一次使用了“Robot”也就是机器人这个词,机器人主要目的是要能够替代人类的劳动。随后,人们把机器人定义为能够自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作。从这个定义出发,机器人的家族就变得非常庞大了,一切能够替代人类劳动的,能够自动执行工作的机器装置,均可以叫做机器人。为了使机器人将来不与人类发生冲突,人们还将规定了机器人的三个原则:1,不伤害人类;2,原则上服从人类给出的命令;3,在与上面两个原则不矛盾的情况下能够保护自身。
随着人们生活水平的日益提高,机器人“走出工厂”,“走进社会”已成为必然。尤其是人工智能技术与计算机云技术的发展,仿佛给机器人注入了灵魂一般,机器人从众多的智能化设备中脱颖而出,已经能够实现在餐厅送餐、在商场导购、在景区、游乐场所等与人交流互动,这些机器人已经具有了一定的“人形”,也能够说一定的“人话”。但是聪明的你又会发现,为了引人注目,它们大部分外形都被设计为乖巧可爱的萌系,而且底盘被设计为基于轮子的移动方式,这种移动方式可以节约能量,技术成熟而且制造成本低,是目前比较经济实用的方案。 其主要缺点是地形适应能力较差,无法实现跳跃、上台阶等动作。不管怎么样,看起来还是与人类更接近了,不过挺着的大肚子还有待改善。
为了模拟人和动物等自然界一些高等生物的行走方式,科学家们经过不懈的追求和努力,研发出了“腿式”机器人。具有四足的“仿生狗”机器人能够拔山涉水,无惧路障与地形,曾经风靡一时,一直引领着机器人的学科进步,成为机器人研发人员心目中的“英雄”。英雄的一生注定是孤独的,因为很长一段时间内它代表了机器人领域机电控制技术的最高水平。直到后来它的家族增添了两足的“人形”机器人(Atlas),增加了“肌肉男”的美感和生物线条,更重要的是它能实现诸如“后空翻”等人类运动员才能做出的动作,跑、跳、越障等动作更是无所不能,让人们感到羡慕不已。
Atlas的孤独不会持续太久,科学家们的追求也不会止步,除了追求机器人的“智能化”以外,机器人的“仿生化”的趋势也越来越近,像鱼儿能够遨游大海,像鸟儿能够飞翔蓝天。生物如此多样,机器人亦如此,简单的机械结构便可以实现自主可控的智能,小巧而精妙的设计中蕴含着智慧的结晶,你虽然没有过“蜘蛛侠”的豪迈与激情,但也能用梦想书写传奇。
清秀的骨骼固然重要,拥有柔美曲线的机器人才是人们的心中所想。追求机器人的“智能化”、“仿生化”的终极目标是要让机器人越来越多地走进人类的生活。你可能不止一次地会在科幻小说、电影等场景中了解到,未来的机器人是要为人类服务,与人类共同生活携手走向未来的。机器人的类生物特性,机器人在与人合作时的安全性就显得尤为重要,也是科学家们在创造新的机器人时主要考虑的因素。“以柔克刚”是生物表现出的特征之一,如“抓鸡蛋而不破”、“过窄缝而不伤”等等。因此,采用柔性器件与材料的软机器人、连续体等机器人具有较强的环境适应性和本质安全性已成为近期机器人领域研究的前沿热点方向。虽然科幻大片中出现的类生命体式智能机器人还有待科学的进一步突破,可能也会在不就的将来出现,但它绝不是钢铁猛兽,而是具有情感表达能力,乖巧可爱的人类的朋友。
随着世界科技水平的更新与发展,机器人世界的成员及种类越来越多,机器人为我们的生活添加了丰富多彩的元素,我们也需要为机器人的设计提供新的思路。现有机器人相关技术大致包含了两个方面:一种是智能机械,即利用各种传感器元件设计复杂的控制算法,提升机械的智能性;另一种是机械智能,即不依赖于传感器及中央控制算法,从机械本身的机构设计出发,通过机械本体感知外界或自身状态变化并作出智能的反应。而将来的机器人将是二者的融合体,不仅具有高度智能的思维也融合了巧妙的设计元素体现机器本身的智能,可以预见,有机器人陪伴的未来世界将更加丰富多彩。
(本文所有图片均来自网络)

串联机器人 并联机器人 工业移动机器人

餐厅服务机器人 迎宾服务机器人

四足机器人 两足机器人(Atlas)

机器鱼 机器鸟 蜘蛛机器人
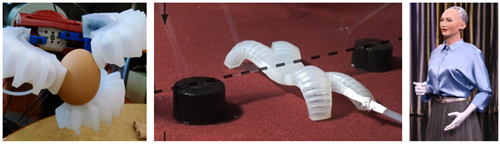
软体机械手 软体机器人 仿人机器人(索菲亚)
(先进制造所 郑天江)